持続可能な宇宙環境を目指し、スペースデブリ(宇宙ごみ、以下、デブリ)除去を含む軌道上サービスに取り組む株式会社アストロスケールホールディングス(本社:東京都墨田区、代表取締役社長兼CEO 岡田光信)の子会社で人工衛星システムの製造・開発・運用を担う株式会社アストロスケール(本社:東京都墨田区、代表取締役社長 加藤英毅、以下「アストロスケール」)はこの度、今年2月に開始した商業デブリ除去実証衛星「ADRAS-J(アドラスジェイ、Active Debris Removal by Astroscale-Japan の略)」のミッションにおいて、観測対象のデブリから約15mの距離まで接近に成功したことをお知らせいたします。これは、民間企業がRPO※1(ランデブ・近傍運用)を通じて実際のデブリに接近した、世界で最も近い距離※2です。
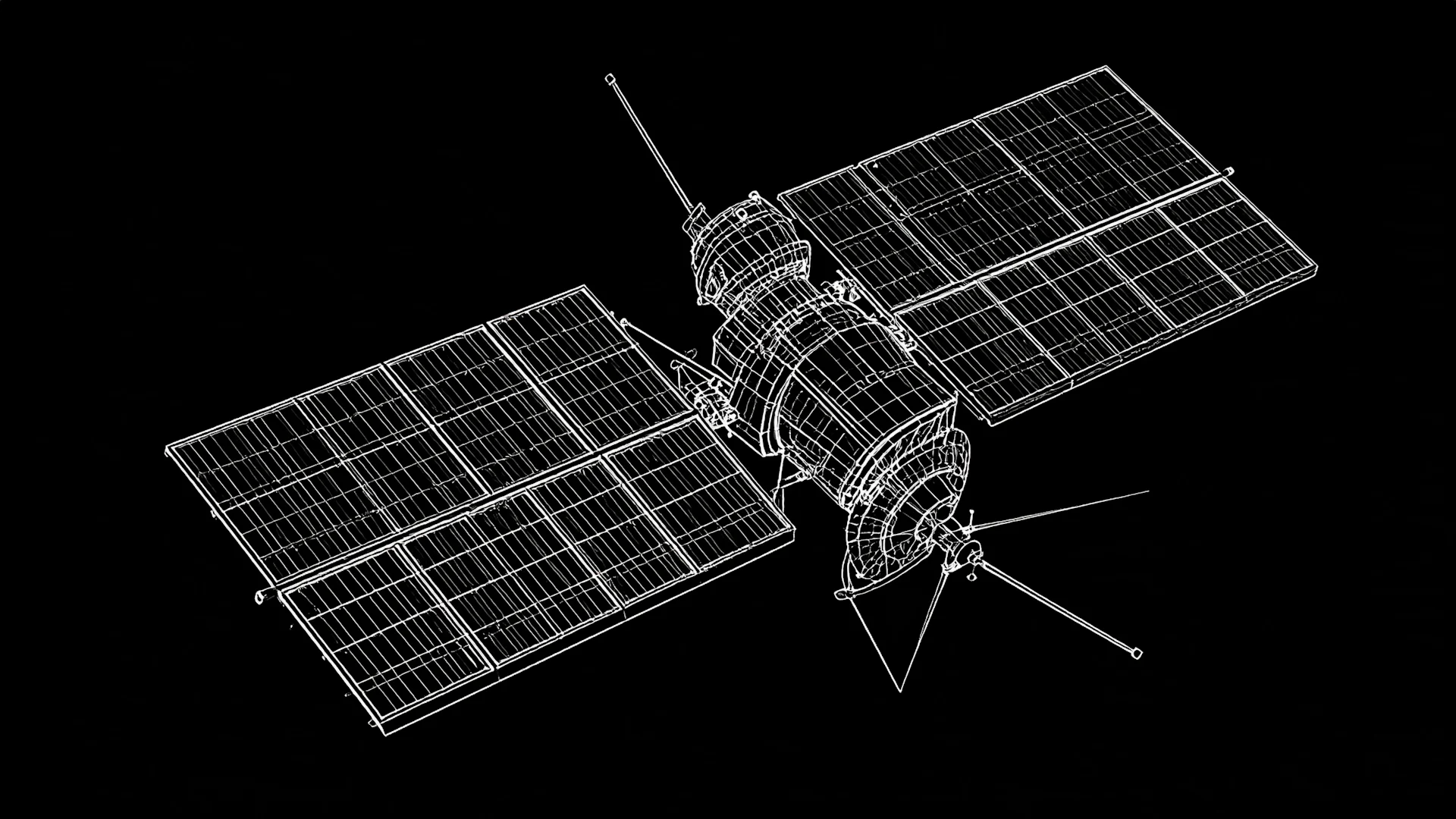
運用を終了した衛星やロケット上段等のデブリは非協力物体※3と呼ばれ、外形や寸法などの情報が限られるほか、位置データの提供や姿勢制御などの協力が得られません。そのため、その劣化状況や回転レートなど、軌道上での状態を把握しつつ当該デブリに安全・確実にRPO(ランデブ・近傍運用)を実施することは、デブリ除去を含む軌道上サービスを提供するために不可欠な技術です。ADRAS-Jは実際のデブリへの安全な接近を行い、近距離でデブリの状況を調査する世界初※4の試みです。具体的には、大型デブリ(日本のロケット上段:全長約11m、直径約4m、重量約3トン)への接近・近傍運用を実証し、長期間軌道上に存在するデブリの運動や損傷・劣化状況の撮像を行っています。
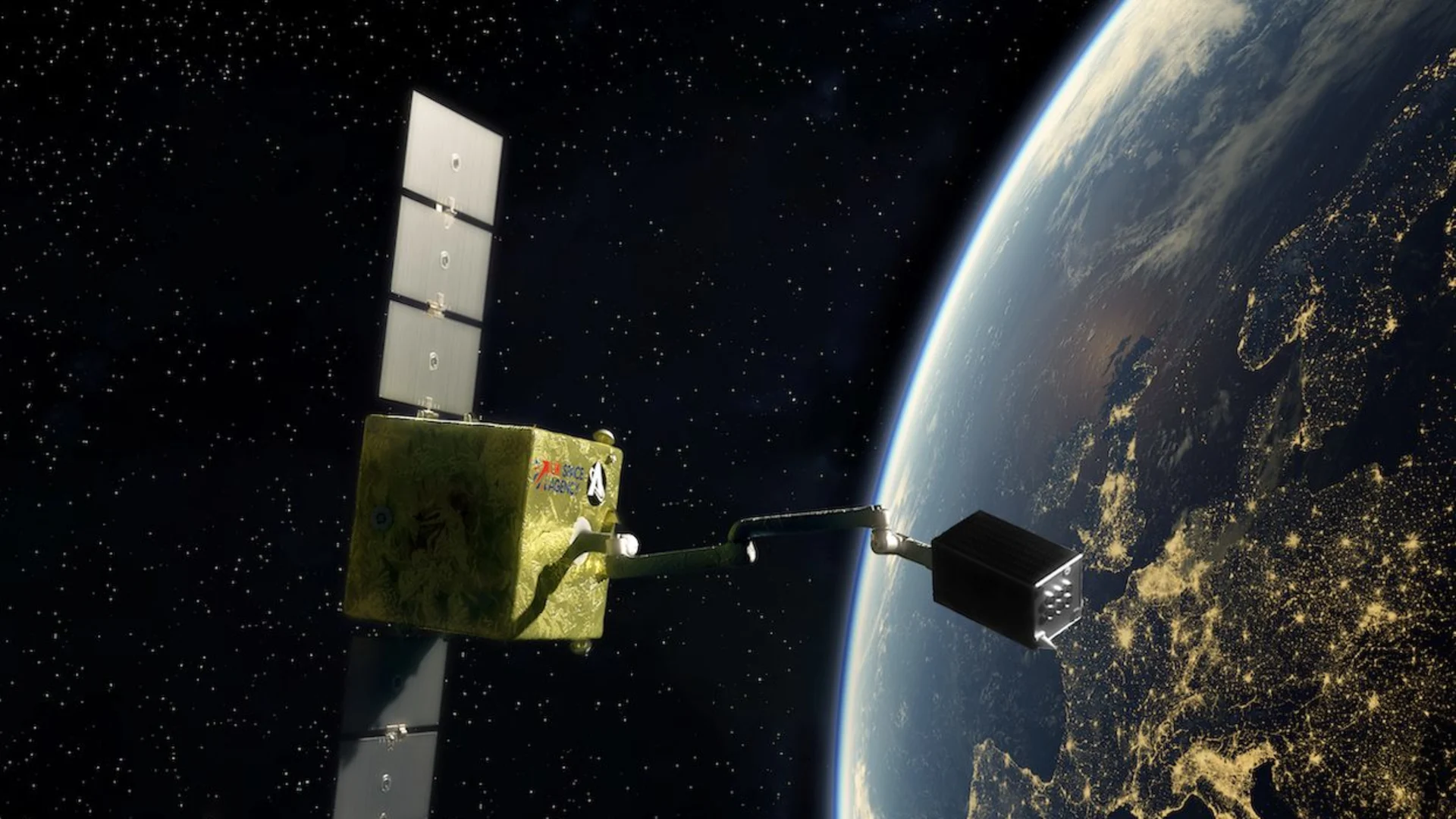
本ADRAS-Jミッションは宇宙航空研究開発機構(JAXA)が大型デブリ除去等の技術実証を目指し実施する商業デブリ除去実証(CRD2※5)のフェーズIとして実施しておりますが、今回の接近は、JAXAのミッション要求とは別にアストロスケールが独自に実施した事業者独自ミッションであり、捕獲運用直前までのRPOを実証し、将来のミッションに備えることを目的としていました。具体的には、まずデブリの後方50mの距離から、デブリと同一の軌道上を直進し、その後、将来デブリの除去としてその捕獲や軌道離脱も行うADRAS-J2(Active Debris Removal by Astroscale-Japan2 の略)のミッションで捕獲箇所として想定している衛星分離部(PAF※6)の下方に回りこんで接近、最終的には、同ミッションで対象デブリの捕獲運用開始を想定している距離(CIP※7)にまで接近し、相対的な速度、距離、姿勢を合わせる想定でした。
実施の運用では、これまでの近傍接近の運用と同様に、搭載センサでデブリの3D形状を高精度で測定し、その動きをリアルタイムで観測。自律的なナビゲーションシステムでそのデータをリアルタイムで処理し、デブリの動きを予測しながら自身の軌道や姿勢を制御しながら段階的に距離を縮めました。接近や姿勢制御がこれまで以上に繊細で困難な極近距離において、慎重かつ精密な運用により、予定通りデブリの後方50mからPAFの下方約15mに機体を位置付け、一定の時間、相対的な距離と姿勢を維持することに成功しました。その後ADRAS-Jがデブリとの相対姿勢制御の異常を検知し、自律的にアボート※8を行いました。結果としてADRAS-Jはデブリから待避しており、安全な状態を保っています。
このアボートは、2024年7月9日に発表した1度目の周回観測時のアボートと同様に、衛星が自身の内部の異常や対象物体との相対距離や姿勢の異常を検知し対策を行うシステムであるFDIR※9が機能したものです。今回、極近距離での運用中でも安全を確保できること、そして軌道上にて設計通りに自律的アボートマヌーバが実施されたことにより衝突回避機能の設計の正しさを再度確認することができました。
また、7月実施の周回観測では、当該デブリのPAFに大きな損傷が見られないことが明らかになっていました。8月13日にも再度周回観測を実施しており、別アングルでの撮影に成功しています。そして今回、15mより近傍に接近することは叶わなかったものの、50mから15mへとデブリとの距離をさらに縮め、その後のアボートも含めて、ADRAS-J2のミッションに向けて宇宙の軌道における運用のさらなるデータを集めることができたと同時に、今後の軌道上サービスの提供に向けてより一層RPOの実績を積むことができました。
2月18日:Rocket LabのElectronロケットにより打上げ
2月22日:デブリへの接近を開始
4月9日:相対航法(AON※10)と近傍接近を開始
4月16日:相対航法(MMN※11)を開始
4月17日:デブリの後方数百mへの接近に成功
5月23日:デブリ後方約50mへ接近に成功、定点観測(1回目)を実施・成功
6月17日:定点観測(2回目)を実施・成功
6月19日:周回観測(1回目)を実施。アボートにより衝突回避機能の有効性を実証
7月14日:デブリ後方約50mに到達、定点観測(3回目)を実施・成功
7月15日:周回観測(2回目)を実施・成功
7月16日:周回観測(3回目)を実施・成功
7月17日:最終接近(1回目)を実施、約20mへの接近に成功。その後アボートにより衝突回避機能の有効性を実証
8月13日:周回観測(4回目)を実施・成功
11月30日:最終接近(2回目)を実施、PAFの下方約15mへの接近・位置付けに成功。その後アボートにより衝突回避機能の有効性を実証
※1 RPO:Rendezvous and Proximity Operations Technologiesの略称。ランデブ・近傍運用 ※2 過去に同様のミッションが実施されたか否かを自社で調査(2024年12月) ※3 非協力物体:接近や捕獲・ドッキング等を実施されるための能力・機器を有さない物体のこと ※4 過去に同様のミッションが実施されたか否かを自社で調査(2024年6月) ※5 CRD2:Commercial Removal of Debris Demonstrationの略称 ※6 PAF:Payload Adapter Fittingの略称。ロケットと衛星をつなぐ台座 ※7 CIP:Capture Initiation Pointの略。捕獲運用を開始する相対位置 ※8 アボート:クライアントに対する衝突を回避するためマヌーバを実施し安全な距離まで待避すること ※9 FDIR:Failure Detection Isolation and Recoveryの略称 ※10 AON:Angles-Only Navigationの略称。デブリの方角情報を用いる相対航法 ※11 MMN:Model Matching Navigationの略称。デブリの形や姿勢の情報を用いる相対航法